MKS SBASE Smoothie
From
Contents
The hardware
The Smoothieboard is a controller for 3D printers, laser cutters and CNC machines. The MKS-SBASE is a cheap chinese clone of the Smoothieboard hardware.
Here are some links to get started: Smoothieboard (official website) Github repository with information on the MKS-SBASE board
Uses at Tkkrlab
We currently have one MKS-SBASE board built into our [Laser_Cutter|laser cutter]].
Smoothieboard config (15-06-2016)
## Robot module configurations : general handling of movement G-codes and slicing into moves
default_feed_rate 8000 # Default rate ( mm/minute ) for G1/G2/G3 moves
default_seek_rate 8000 # Default rate ( mm/minute ) for G0 moves
mm_per_arc_segment 0.5 # Arcs are cut into segments ( lines ), this is the length for
# these segments. Smaller values mean more resolution,
# higher values mean faster computation
# Arm solution configuration : Cartesian robot. Translates mm positions into stepper positions
alpha_steps_per_mm 158.2 # Steps per mm for alpha stepper
beta_steps_per_mm 158.2 # Steps per mm for beta stepper
# Planner module configuration : Look-ahead and acceleration configuration
planner_queue_size 8 # DO NOT CHANGE THIS <- Fuck that. I changed it anyways. \(^_^)/
acceleration 300 # Acceleration in mm/second/second.
acceleration_ticks_per_second 1000 # Number of times per second the speed is updated
junction_deviation 0.05 # Similar to the old "max_jerk", in millimeters,
# see https://github.com/grbl/grbl/blob/master/planner.c
# and https://github.com/grbl/grbl/wiki/Configuring-Grbl-v0.8
# Lower values mean being more careful, higher values means being
# faster and have more jerk
# Stepper module configuration
microseconds_per_step_pulse 1 # Duration of step pulses to stepper drivers, in microseconds
base_stepping_frequency 100000 # Base frequency for stepping
# Cartesian axis speed limits
x_axis_max_speed 30000 # mm/min
y_axis_max_speed 30000 # mm/min
# Stepper module pins ( ports, and pin numbers, appending "!" to the number will invert a pin )
alpha_step_pin 2.8 # Pin for alpha stepper step signal
alpha_dir_pin 2.13! # Pin for alpha stepper direction
alpha_en_pin 4.29 # Pin for alpha enable pin
alpha_current 1.2 # X stepper motor current
alpha_max_rate 10000.0 # mm/min
beta_step_pin 2.3 # Pin for beta stepper step signal
beta_dir_pin 0.22 # Pin for beta stepper direction
beta_en_pin 0.21 # Pin for beta enable
beta_current 1.2 # Y stepper motor current
beta_max_rate 10000.0 # mm/min
## System configuration
uart0.baud_rate 115200 # Baud rate for the default hardware serial port
second_usb_serial_enable false # This enables a second usb serial port (to have both pronterface
# and a terminal connected)
#leds_disable true # disable using leds after config loaded
#play_led_disable true # disable the play led
pause_led_pin 1.30
play_led_pin 0.5
# Kill button (used to be called pause) maybe assigned to a different pin, set to the onboard pin by default
kill_button_enable true # set to true to enable a kill button
kill_button_pin 1.28^
lid_switch_pin 1.29^
unkill_button_pin 4.28^
#msd_disable false # disable the MSD (USB SDCARD) when set to true (needs special binary)
#dfu_enable false # for linux developers, set to true to enable DFU
#watchdog_timeout 10 # watchdog timeout in seconds, default is 10, set to 0 to disable the watchdog
# Only needed on a smoothieboard
currentcontrol_module_enable true
## Extruder module configuration
extruder.hotend.enable false
extruder.hotend2.enable false
## Laser module configuration
laser_module_enable true
laser_module_pin 1.23! # PWM output
laser_module_ttl_pin 2.4 # Enable output
laser_module_maximum_power 1.0
laser_module_minimum_power 0.3
laser_module_tickle_power 0.3
laser_module_default_power 0.2
laser_module_pwm_period 20
## Temperature control configuration
# First hotend configuration
temperature_control.hotend.enable false # Whether to activate this ( "hotend" ) module at all.
temperature_control.hotend2.enable false # Whether to activate this ( "hotend" ) module at all.
temperature_control.bed.enable false #
## Switch module for fan control
switch.fan.enable false #
switch.fan.input_on_command M106 #
switch.fan.input_off_command M107 #
switch.fan.output_pin nc #
switch.fan.output_type pwm # pwm output settable with S parameter in the input_on_comand
#switch.fan.max_pwm 255 # set max pwm for the pin default is 255
#switch.misc.enable false #
#switch.misc.input_on_command M42 #
#switch.misc.input_off_command M43 #
#switch.misc.output_pin nc #
#switch.misc.output_type digital # just an on or off pin
# Switch module for spindle control
switch.spindle.enable false #
## Endstops
endstops_enable true # the endstop module is enabled by default and can be disabled here
alpha_min_endstop 1.24^ # add a ! to invert if endstop is NO connected to ground
alpha_max_endstop nc # NOTE set to nc if this is not installed
alpha_homing_direction home_to_min # or set to home_to_max and set alpha_max
alpha_min -3 # this gets loaded after homing when home_to_min is set
alpha_max 420 # this gets loaded after homing when home_to_max is set
alpha_soft_max 420 # Tkkrlab firmware only: software endstop
beta_min_endstop 1.25^ #
beta_max_endstop nc #
beta_homing_direction home_to_min #
beta_min -3 #
beta_max 300 #
beta_soft_max 300 # Tkkrlab firmware only: software endstop
# optional order in which axis will home, default is they all home at the same time,
# if this is set it will force each axis to home one at a time in the specified order
#homing_order XYZ # x axis followed by y then z last
#move_to_origin_after_home false # move XY to 0,0 after homing
# optional enable limit switches, actions will stop if any enabled limit switch is triggered
alpha_limit_enable true # set to true to enable X min and max limit switches
beta_limit_enable true # set to true to enable Y min and max limit switches
alpha_fast_homing_rate_mm_s 50 # feedrates in mm/second
beta_fast_homing_rate_mm_s 50 # "
gamma_fast_homing_rate_mm_s 4 # "
alpha_slow_homing_rate_mm_s 25 # "
beta_slow_homing_rate_mm_s 25 # "
gamma_slow_homing_rate_mm_s 2 # "
alpha_homing_retract_mm 3 # distance in mm
beta_homing_retract_mm 3 # "
gamma_homing_retract_mm 1 # "
#endstop_debounce_count 100 # uncomment if you get noise on your endstops, default is 100
## Z-probe
zprobe.enable false
## Panel
panel.enable true
panel.lcd tkkrlab
panel.spi_channel 0
panel.spi_cs_pin 0.16
panel.buzz_pin 1.31
panel.click_button_pin 3.26!^
panel.back_button_pin 1.27!^
panel.up_button_pin 0.8!^
panel.down_button_pin 3.25!^
panel.test_button_pin 1.22!^
panel.blue_button_pin 2.12!^
panel.yellow_button_pin 4.28!^
panel.menu_offset 0 # some panels will need 1 here
panel.alpha_jog_feedrate 6000 # x jogging feedrate in mm/min
panel.beta_jog_feedrate 6000 # y jogging feedrate in mm/min
panel.gamma_jog_feedrate 200 # z jogging feedrate in mm/min
panel.hotend_temperature 185 # temp to set hotend when preheat is selected
panel.bed_temperature 60 # temp to set bed when preheat is selected
## Custom menus : Example of a custom menu entry, which will show up in the Custom entry.
# NOTE _ gets converted to space in the menu and commands, | is used to separate multiple commands
#custom_menu.power_on.enable true #
#custom_menu.power_on.name Power_on #
#custom_menu.power_on.command M80 #
#custom_menu.power_off.enable true #
#custom_menu.power_off.name Power_off #
#custom_menu.power_off.command M81 #
## Network settings
network.enable true # enable the ethernet network services
network.webserver.enable true # enable the webserver
network.telnet.enable true # enable the telnet server
network.ip_address auto # use dhcp to get ip address
# uncomment the 3 below to manually setup ip address
#network.ip_address 192.168.3.222 # the IP address
#network.ip_mask 255.255.255.0 # the ip mask
#network.ip_gateway 192.168.3.1 # the gateway address
#network.mac_override xx.xx.xx.xx.xx.xx # override the mac address, only do this if you have a conflict
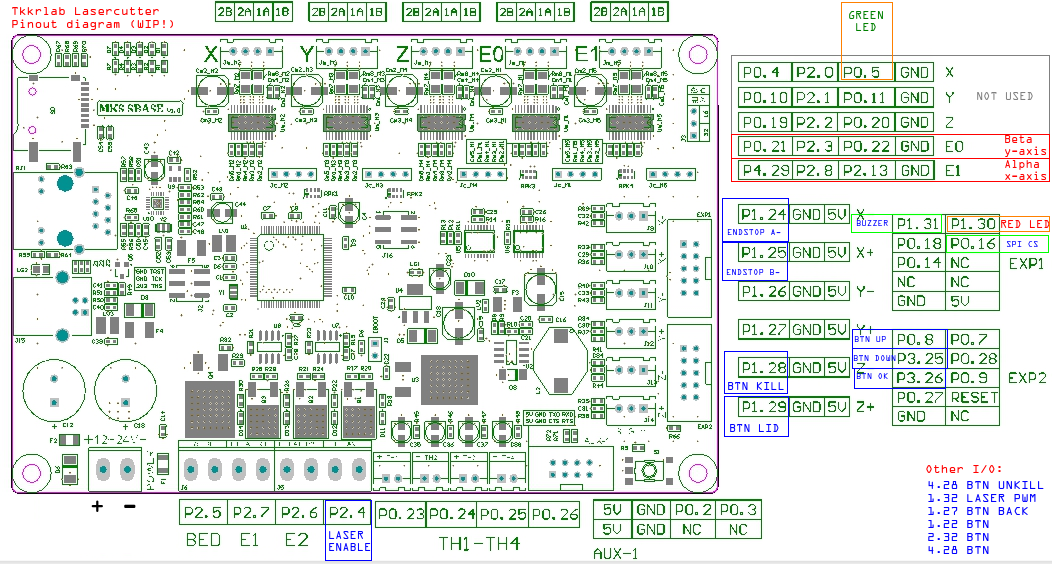
Pinout Lasercutter (Work in progress!)