Difference between revisions of "Quadcopter"
From
m |
|||
| Line 24: | Line 24: | ||
* gps (in the distant future) | * gps (in the distant future) | ||
* and lots more! | * and lots more! | ||
| + | |||
| + | |||
| + | == buy list == | ||
| + | |||
| + | hobbykings | ||
| + | * 4.5 , Turnigy L2210C 1200 Brushless Motors ($45,54) [http://www.hobbyking.com/hobbyking/store/__14738__Turnigy_L2210C_1200_Brushless_Motor_150w_.html] | ||
| + | |||
| + | random ebay shops | ||
| + | |||
| + | * 4 , 30A bürstenlosen Motor Drehzahlregler RC BEC ESC Motor Speed Controllers (€21.96) ([http://www.ebay.de/itm/330868383379?ssPageName=STRK:MEWNX:IT&_trksid=p3984.m1497.l2649] | ||
== de firmware voor de msp430g2553 (adc naar uart) == | == de firmware voor de msp430g2553 (adc naar uart) == | ||
Revision as of 12:29, 13 June 2013
| Project: Quadcopter | |
|---|---|
| |
| Name | Quadcopter |
| Initiator | Michielbrink and Vondel |
| Status | In progress |
| Skills | lots of skills |
| Summary | awesome quadcopter with a lot of sensors |
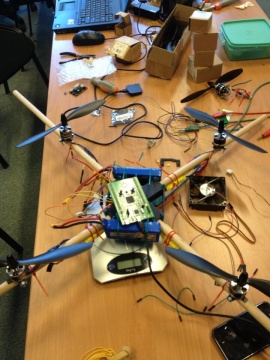
The quadcopter
To give you an idea of what we are planning with our Quadcopter, here is a list of features we want to include:
- gyroscope
- accelerometer
- compass
- ultrasonic range sensors on every corner
- control via wifi
- live webcam stream
- according to a comment with the motors we bought: at 1,3Kg, speed up to 75km/h
- servo to tilt webcam.
- battery measurement through adc -> uart on msp430g2553.
- stm32f3 discovery board as brain.
- raspberry pi for the webcam stream, control and more fun stuff
- gps (in the distant future)
- and lots more!
buy list
hobbykings
- 4.5 , Turnigy L2210C 1200 Brushless Motors ($45,54) [1]
random ebay shops
- 4 , 30A bürstenlosen Motor Drehzahlregler RC BEC ESC Motor Speed Controllers (€21.96) ([2]
de firmware voor de msp430g2553 (adc naar uart)
#include <msp430.h> #include <stdbool.h> #include <stdio.h> #define GND BIT4 #define DAT BIT5 #define RXD BIT1 #define TXD BIT2 char buffer[4]; int adc_new; int adc_old; char * adc_string; void uart_putc(unsigned char c); void uart_puts(const char *str); int adc_read(); void Delay_ms(unsigned int ms); int main(void) { //msp430 init WDTCTL = WDTPW + WDTHOLD; // Stop WDT BCSCTL1 = CALBC1_1MHZ; // Set DCO to 1MHz DCOCTL = CALDCO_1MHZ; //pin init P1SEL = RXD + TXD; P1SEL2 = RXD + TXD; P1DIR |= GND; P1OUT&=~GND; //uart init UCA0CTL1 |= UCSSEL_2; // SMCLK UCA0BR0 = 104; // 1MHz 9600 UCA0BR1 = 0; // 1MHz 9600 UCA0MCTL = UCBRS0; // Modulation UCBRSx = 1 UCA0CTL1 &= ~UCSWRST; // Initialize USCI state machine IE2 |= UCA0RXIE; // Enable USCI_A0 RX interrupt //adc init ADC10CTL1 = INCH_5 + ADC10DIV_3 ; // Channel 5, ADC10CLK/4 ADC10CTL0 = SREF_0 + ADC10SHT_3 + ADC10ON + ADC10IE; //Vcc & Vss as reference ADC10AE0 |= BIT5; //P1.4 ADC option __enable_interrupt(); Delay_ms(1); // Wait for ADC Ref to settle while(1) { Delay_ms(500); adc_new = adc_read()*10/1023; if(adc_new != adc_old) { sprintf(adc_string, "%d",adc_new); uart_puts(adc_string); adc_old = adc_new; } } } //uart void uart_putc(unsigned char c) { while (!(IFG2&UCA0TXIFG)); // USCI_A0 TX buffer ready? UCA0TXBUF = c; // TX } void uart_puts(const char *str) { while(*str) uart_putc(*str++); } //adc int adc_read() { ADC10CTL0 |= ENC + ADC10SC; // Sampling and conversion start __bis_SR_register(CPUOFF + GIE); // LPM0 with interrupts enabled return(ADC10MEM); } __attribute__((interrupt(ADC10_VECTOR))) void ADC10_ISR(void) { __bic_SR_register_on_exit(CPUOFF); // Return to active mode } //delay void Delay_ms(unsigned int ms) { while(ms--) { __delay_cycles(1000); } }
